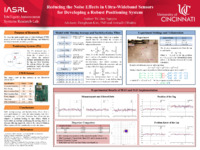
Reducing the Noise Effects in Ultra-Wideband Sensors For Developing a Robust Positioning System
Article Sidebar
Main Article Content
Abstract
By Tri Nguyen, Aerospace Engineering
Advisor: Donghoon Kim
Award: Excellence in Research Communication
Presentation ID: 288
Abstract: A robust positioning system (PS) is useful in several aerospace applications, such as the localization of robots and UAVs in scenarios where GPS doesn't work like factories and buildings. PSs can be constructed using various sensor technologies, such as Bluetooth, WiFi, LoRa, camera, and ultrasonic sensors. Ultra-Wideband, or UWB, sensors offer various advantages over the mentioned technologies including low size, weight, power, and resistance to disturbances in the environment. For these reasons, UWB sensors are selected to develop a robust PS in this work. In real-life environments, UWB sensors are susceptible to disturbances due to unexpected obstacles nearby, and therefore filtering techniques are required to reduce such effects and increase accuracy. In this study, after studying the effects of noise on UWB sensors, we applied two different filtering techniques like the moving average filter and the Savitzky-Golay filter to reduce the disturbance from the measurements. This resulted in improving the localization performance of a target in the disturbed environment.